
~リハビリテーションと補助技術への応用~
近年の研究により、物体操作時の「手の選択」と「把持方法」が、従来の単なる利き手の使用習慣だけでなく、運動効率や課題の意図に大きく左右されることが明らかになっています。
今回ご紹介するのは、2016年に Frontiers in Psychology で発表された論文をもとに、理学療法士や作業療法士の現場で活用できる最新の知見と臨床応用の可能性についての解説です。
研究の概要から解説していきます。
研究概要:手の選択と把持方法のメカニズム
1. 研究の背景と目的
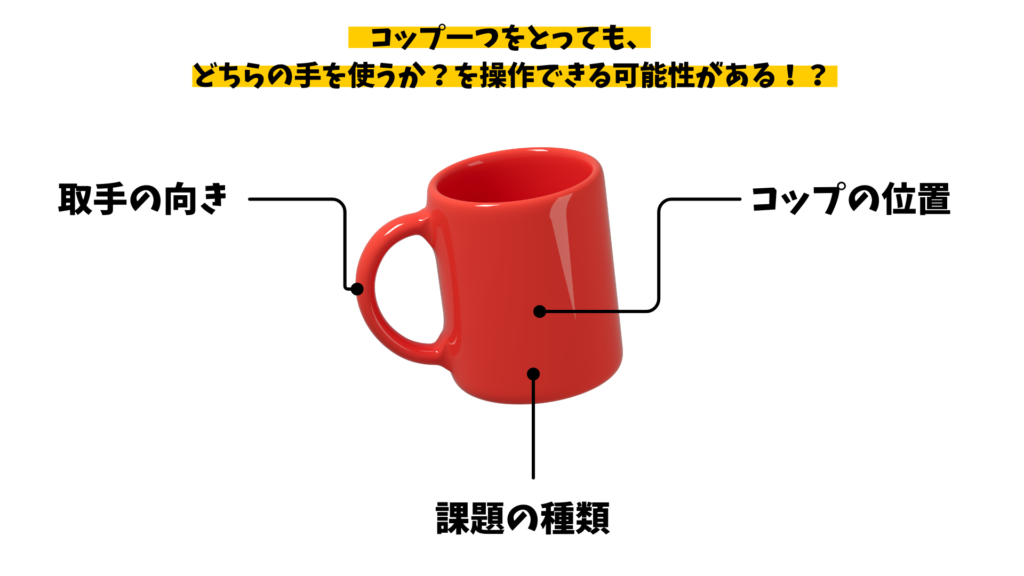
• 物体位置と向きの影響
従来、右利きの被験者は右側の物体を右手で取る傾向があるとされていましたが、本研究では物体の位置や向き、さらには課題の意図(例:単に持ち上げる、注ぐ、相手に渡す)による影響が詳細に検証されました。
• タスクの種類
被験者は、以下の4つのタスクを実施しました。
1. Pick-up:片手で物体を持ち上げる
2. Pick-up and pour:持ち上げた後に注ぐ
3. Pick-up and pass:持ち上げた後に相手に渡す
4. Pick-up, pour and pass:持ち上げ、注ぎ、渡す
2. 主な結果
• 右手の選択率
物体が右側に配置されると右手使用率が高く、タスクが片手作業の場合はさらに右手使用が顕著でした。
一方、両手作業のタスクでは、右手が主要な操作、左手が安定化の役割を果たすという役割分担が明らかに。
• 把持方法の特徴
取っ手の向きが手前を向いている場合、握る割合が高くなるなど、物体の向きも把持選択に影響を与えることが確認されました。
臨床現場への応用:リハビリテーション・補助技術への示唆
1. 脳卒中後リハビリテーションにおける手の活用戦略
• 麻痺側の手の積極活用
脳卒中患者では、麻痺側の手の使用が低下しがちですが、本研究の知見は「物体の配置」や「取っ手の向き」の調整を通じ、患者が自然に麻痺側を使う動作パターンを誘導できることを示唆しています。
• 具体例: 右利きの患者の場合、右側に物体を配置し、初期は利き手で操作しながら徐々に麻痺側の負担を増やすバイマニュアルトレーニングを実施。
• 両手協調(バイマニュアル)トレーニングの強化
片手だけでなく、両手の役割分担を意識したリハビリは、動作効率の向上に寄与します。例えば、「Pick-up and pour」タスクを用いて、麻痺側が安定化、非麻痺側が操作を担う訓練が効果的です。
2. 義手やロボットアームの設計への応用
• ユーザーの自然な手選択パターンの反映
義手設計や補助ロボットの開発において、本研究で示された「物体位置」や「把持方法」のデータは、ユーザーが自然に使いやすい動作モデルの構築に役立ちます。
• 設計ポイント: センサーで物体の位置や向きを認識し、最適なグリップを自動補助する機能の開発。
• 共同作業を考慮した動作プログラム
特に、物を相手に渡すシーンでは、共同作業時の手の選択や把持方法の知見が、ロボットアームの動作アルゴリズム改善に繋がります。
3. 認知症・発達障害への運動療法
• 認知症患者の運動評価とトレーニング
物体の位置や向きに応じた手の選択パターンを観察することで、認知機能の低下や協調運動の障害を評価でき、適切な運動プログラムの設計が可能です。
• 発達障害児の協調運動支援
ASDや発達性協調運動障害(DCD)の子供に対しても、両手を使うタスクを取り入れたトレーニングにより、自然な動作パターンの獲得を促進できます。
まとめ:臨床応用と今後の展望
本研究は、「手の選択は単なる利き手の習慣ではなく、運動効率やタスクの意図に基づく」 という新たな視点を提供しています。理学療法士や作業療法士の皆様は、以下のポイントを現場に活かすことができます!
• リハビリテーション:脳卒中や他の神経疾患の患者に対する、麻痺側の手の積極活用およびバイマニュアルトレーニングのプログラム開発
• 補助技術:義手やロボットアームの設計において、自然な手選択・把持パターンを反映したシステムの構築
• 運動療法:認知症や発達障害の支援プログラムに、手の選択と把持の知見を取り入れた評価・トレーニングの実施
今後、より自然な動作環境下での検証や、左利きの被験者を含む多角的な研究が進むことで、さらに効果的な介入方法が確立されることが期待されますね!
この最新の研究知見を取り入れることで、患者さん一人ひとりに合わせた個別のリハビリテーションプログラムや補助技術の開発が進むことが期待されます。現場での実践にぜひお役立てください。
※本記事は、最新の研究成果に基づき、臨床現場での応用可能性を検討したものです。各症例に合わせた具体的な介入は、専門家の判断のもと実施してください。
参考文献
Scharoun, S. M., Scanlan, K. A., & Bryden, P. J. (2016). Hand and grasp selection in a preferential reaching task: The effects of object location, orientation, and task intention. Frontiers in Psychology, 7, 360. https://doi.org/10.3389/fpsyg.2016.00360
